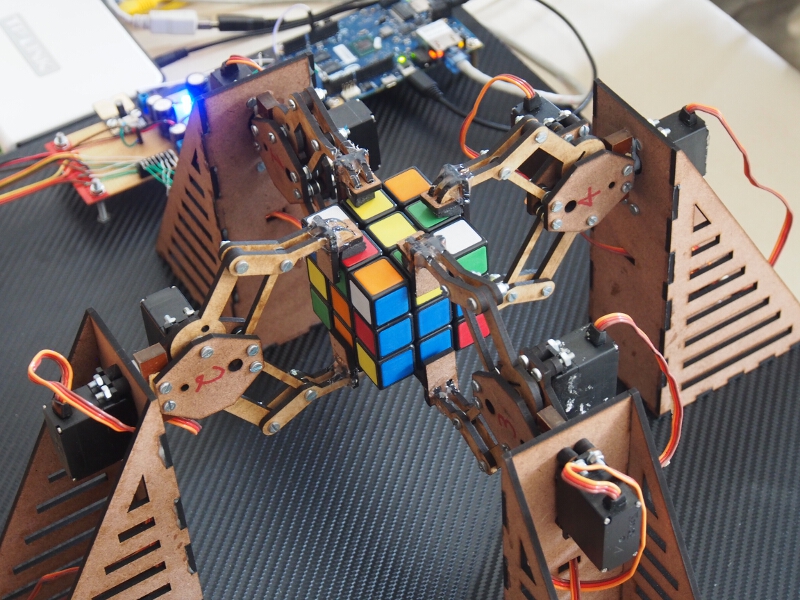
케이프타운 대학교 4학년에 재학 중인 브렛 핌(Brett Pym), 캐머런 핌(Cameron Pym) 형제가 직접 큐브을 맞추는 로봇을 만들었다. 로봇 공학에 항상 관심이 많던 형제였지만 이렇게 직접 로봇을 만들어본 것은 처음이라고 한다.
이 형제는 큐브 로봇을 만들기 위해 인텔에서 1주일 동안 훈련을 받았다. 인텔은 자사의 칩인 ‘갈릴레오’를 활용해 새로운 프로젝트를 선보일 학생들을 찾고 있었다. 인텔의 갈릴레오는 인텔 쿼크 SoC X1000 응용처리장치의 초소형 제어보드로 32-비트 인텔 펜티엄급 시스템이 탑재된 칩이다. 핌 쌍둥이는 이 갈릴레오와 서보모터, 카메라 등으로 큐브 퍼즐을 만드는 로봇을 만들었다.
쌍둥이는 구글이 제공하는 무료 모델링 툴인 스케치업(SketchUp)을 활용해 3D 디자인을 했으며 2D 레이저 커팅 프로그램을 활용해 모든 부품을 출력했다. 큐브 퍼즐을 잡는 부분과 베이스는 천연 목재에 화학물질을 첨가해서 튼튼하게 만든 슈퍼우드로 만들었다.
먼저 큐브가 어떻게 섞였는지를 알기 위해서 카메라가 한 번에 한 줄씩 스캔하여 컴퓨터로 전송하게 된다. 한 줄을 스캔하고 나면 큐브의 위치가 조종돼 다음 줄을 스캔하고 이게 반복돼서 한 면 전체를 스캔하게 되는 것이다. 이렇게 얻은 색깔 정보는 갈릴레오가 이해할 수 있는 문자열로 디코딩된다.
갈릴레오는 컴퓨터에서 큐브 색상의 정보를 담고 있는 문자열을 전송받아 해독한 후 노트북에 내려받아져 있는 웹 서버로 정보를 전송한다. 정보를 전송할 때에는 이더넷 포트(LAN 포트)와 라우터를 활용한다. 서버가 정확한 솔루션, 즉 큐브의 각 면을 같은 색으로 맞출 수 있는 방법을 문자열의 형태로 로봇에 전송하면 갈릴레오가 이 문자열을 해독해 아두이노에게 명령을 내린다. 그러면 이 아두이노가 로봇의 손을 움직여 블록을 맞추는 것이다.
이 로봇에도 한가지 약점이 있었으니, 바로 실내조명이 너무 밝으면 구동이 안된다는 것이다. 로봇에 달린 카메라가 일정한 정도의 빛 아래에서 큐브 블록의 이미지 정보를 읽을 수 있기 때문이다.
핌 형제는 "이 로봇이 큐브를 맞추는 속도보다 최소한의 움직임으로 큐브를 맞추는 데 초점을 맞추고 있다"며 "이 로봇은 20회 이하의 움직임으로 큐브를 완성할 수 있다"고 말했다.
자료 및 사진 출처 : htxt.africa